

PRODUCTS
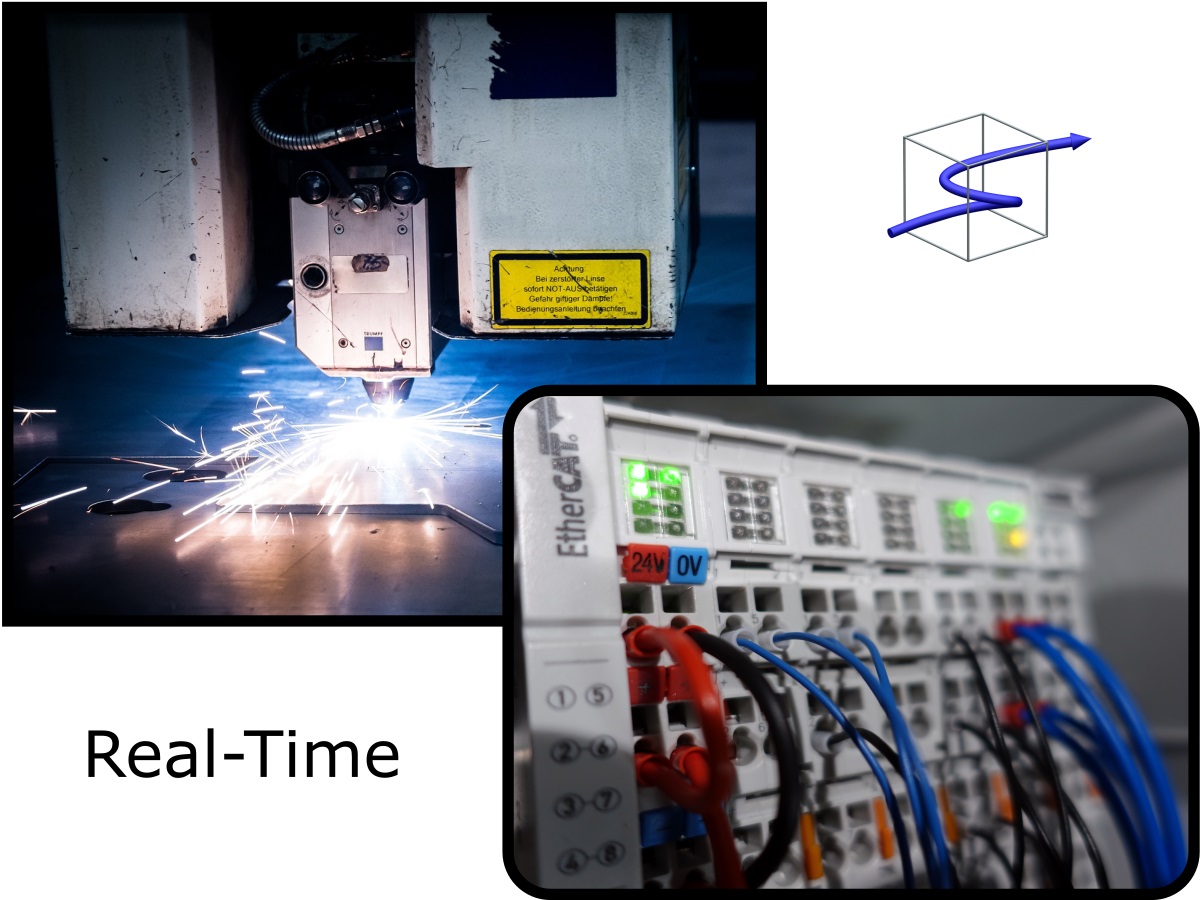
OJET Real-Time
OJET Real-Time is the powerful mathematical OJET software library that runs directly on your machine’s control system. It is designed for maximum performance, extremely fast and predictable execution times and a very small memory footprint. OJET Real-Time runs without dependencies; a previous initialization is unnecessary.
The small footprint and efficient use of computational resources makes the software the ideal candidate for Programmable Logic Controllers (PLCs) and embedded devices, such as high performance motion control systems or for Variable Frequency Drives (VFDs).
OJET Real-Time is suitable for all C-compatible architectures, and is currently available for Beckhoff TwinCAT 3 and the STM32 microcontroller series. For optimal performance, a floating point unit (FPU) is recommended.
Other target platforms are available on request.

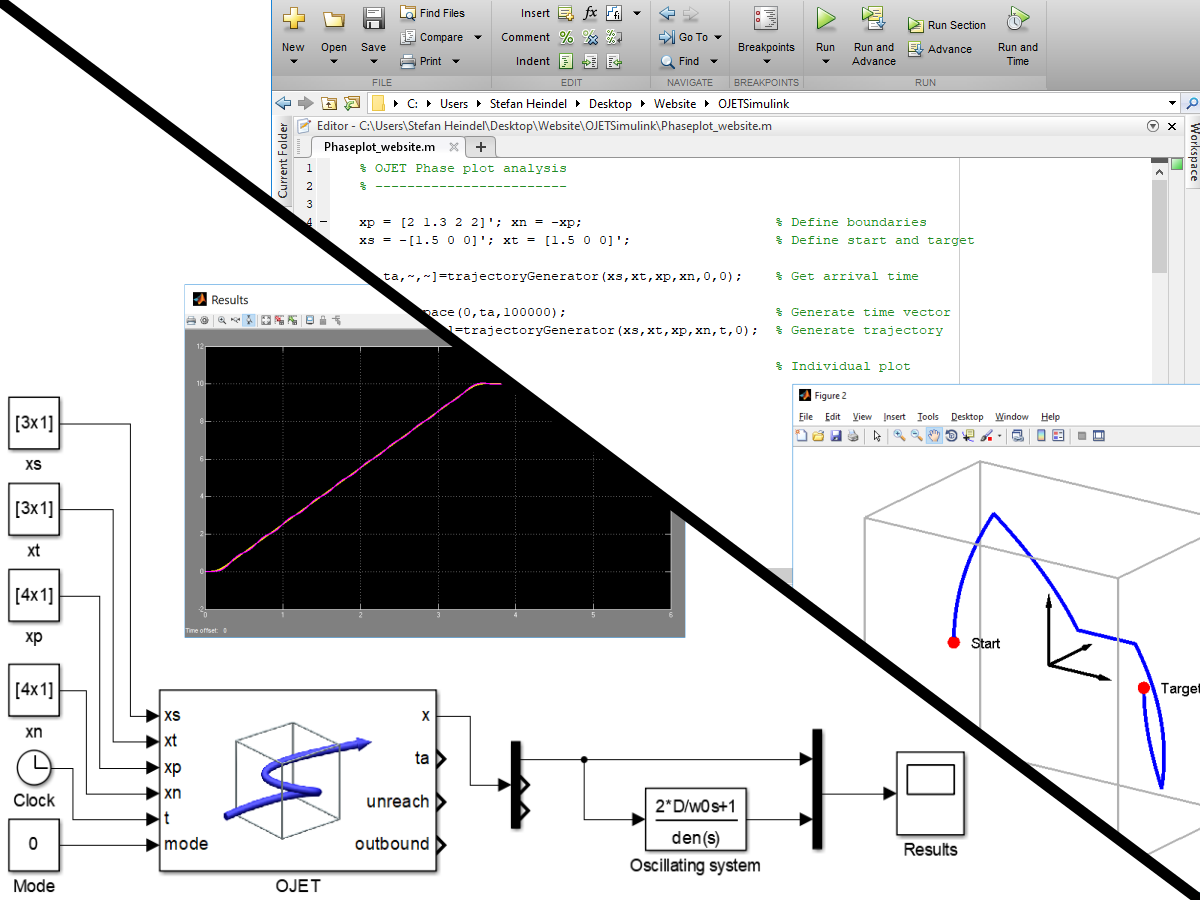
OJET Matlab / Simulink library
Combine the OJETs fast and powerful trajectory generation algorithm with the the incredible flexibility of MATLAB / Simulink! Design parameter studies, examine movement times, or write your own time or frequency optimization script – the possibilities are only limited by your imagination. OJET comes in particularly handy for quick performance studies and visualizations in the early project phases.
Simulate the effects of a trajectory on your dynamic system with the OJET Simulink Block. Observe the system’s response and optimize timing and residual oscillations. OJETs ability to continuously evaluate trajectories enables the use of both fixed and continuous solvers.
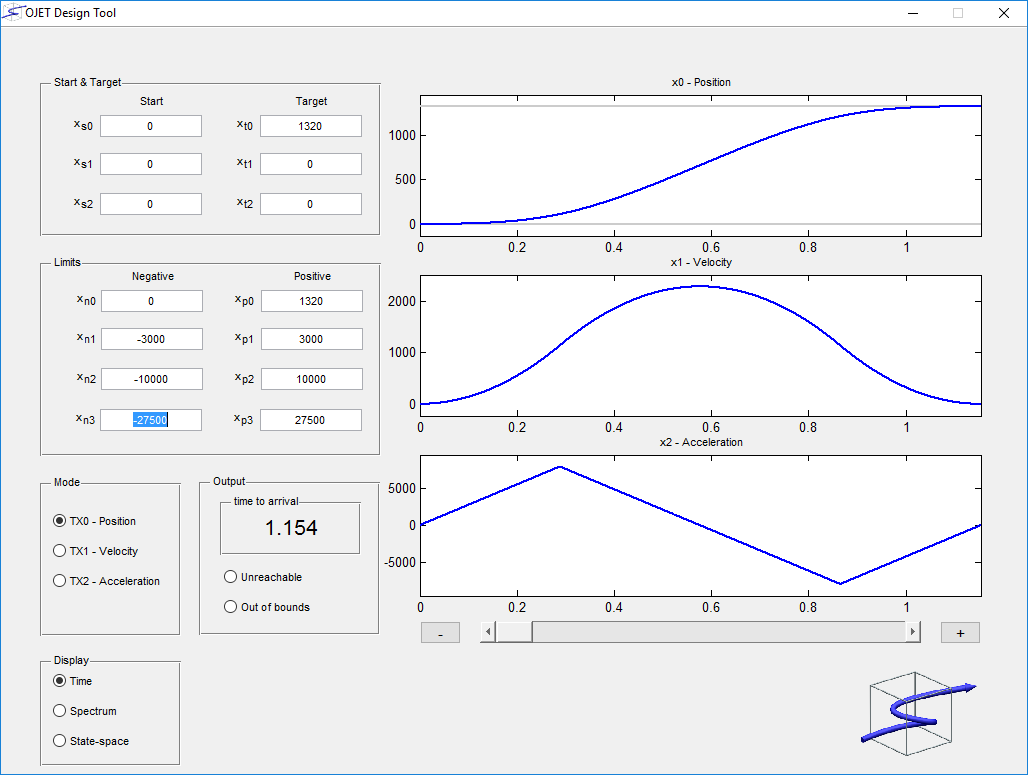
OJET Designer *
Design and optimize your trajectories with this intuitive tool on your Desktop computer. OJET Designer combines the extremely fast mathematical core of the OJET Trajectory Generator with an easy-to-use interface.
OJET Designer allows you to create trajectories, generate parameter studies, and optimize timings. Naturally, OJET Designer allows the trajectory optimization for flexible systems in frequency domain. Just enter the system’s dynamic properties and let OJET Designer choose the fastest trajectory with minimum excitation for you.
(* in development)